QR519 փոխանցում է Ասեր տարբերություն Chery A3 M11- ի համար
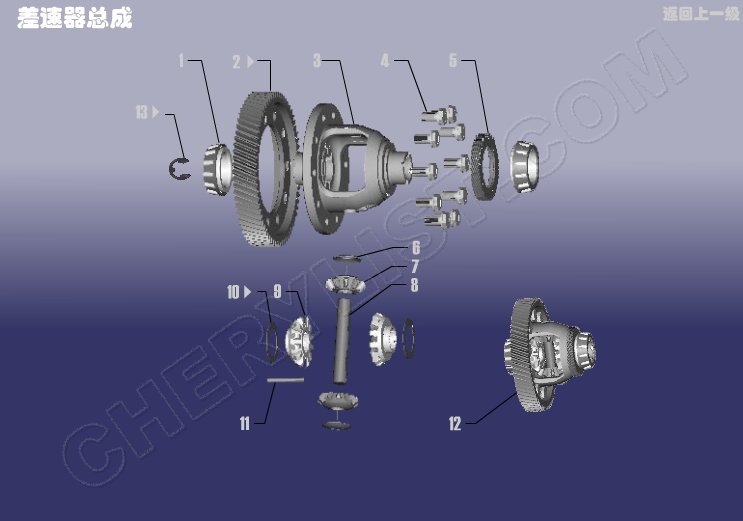
1 QR519MHA-1701703 FR-RR կրող - Տարբերություն
2 CSQ-CDCL- ի վրա հիմնված փոխանցում - տարբերություն
3 QR519MHA-1701701 Բնակարան - տարբերություն
5 QR519MHA-1701705 Drive Gear - Odometer
6 QR519MHA-1701714 լվացարան - գնդակը
7 QR523-1701711 Gear - Diff Planetary
8 QR523-1701712 լիսեռ - տարբերություն
9 QR523-1701709 SD GEAR
10 CSQ-BZCLTP լվացող մեքենա - SD Gear
11 QR519MHA-1701713 PIN - Planetay Gear Shaft
12 QR519MHA-1701700 տարբերություն
13 CSQ-TZDP Լվացքի մեքենա - RR Differentia Bearing Ring OTR
1, փոխանցումը գտնվում է շարժիչի հետեւում, եւ դրա բնակարանները ամրացված են շարժիչով պտուտակներով:
2, փոխանցման գործառույթ
1. Փոխեք փոխանցման գործակիցը (որոշեք մեքենայի արագ արագությամբ վազող մեքենայի արագությունը)
2-ը: Փոխեք ուժի ուղղությունը (հակադարձ փոխանցում)
3. Իրականացրեք չեզոք փոխանցում (պարապ տեղում տեղում):
3, փոխանցման դասակարգման համաձայն, փոխանցումը բաժանվում է ձեռնարկի փոխանցման եւ ավտոմատ փոխանցման, եւ նրանց հանդերձանքի լծակը նույնպես տարբեր է: Ինչպես ցույց է տրված ներքեւում գտնվող նկարում, բոլորս գիտենք, որ ավտոմեքենան բաժանված է առջեւի սկավառակի եւ հետեւի սկավառակի: Դրան հարմարվելու համար փոխանցումը նույնպես բաժանվում է լայնակի փոխանցման եւ երկայնական փոխանցման: Անցող փոխանցումը համապատասխանում է առջեւի սկավառակի վրա, եւ երկայնական փոխանցումը համապատասխանում է հետեւի սկավառակի վրա: Քանի որ ավտոմատ փոխանցման բարդությունը մի փոքր ավելի բարձր է, եկեք նախ եւ առաջ սովորենք ձեռքով փոխանցման իմացությունը, այնպես որ այստեղ մենք կբացատրենք ձեզ ձեռքով փոխանցումը:
4, ձեռքով փոխանցման կազմը սովորաբար բաղկացած է մուտքային լիսեռից, ելքային լիսեռից, միջանկյալ լիսեռից, դիֆերենցիալ եւ վերափոխիչից (լայնակի փոխանցման դիֆերենցիալ ժողովը հավաքվում է փոխանցման միջոցով), շարժակների, առանցքային պատառաքաղ, նավթի Կնքեք, քսայուղով յուղ, կեղեւ, ելքային եզրագիծ եւ այլն: Փաստորեն, հերթափոխի իրացումը համատեղ թեւի միջոցով տարբեր հերթափոխի շարժակների եւ սինխրոն օղակների միացումն է: Այնուհետեւ իշխանությունը ելքային լիսեռի միջոցով է համաժամեցման միջոցով `տարբեր փոխանցումների արտադրանքի իրականացման համար: Փոխվելիս մենք տեղափոխում ենք հերթափոխի հսկողության բռնակը, այնուհետեւ տեղափոխման պատառաքաղը տեղափոխում է փոխանցման վրա աշխատելու համար: Shift Fork- ը համատեղ թեւը տեղափոխում է համաժամացման վրա `տարբեր փոխանցումների փոփոխություններ իրականացնելու համար:
5, ձեռքով փոխանցման ինքնազբաղման եւ փոխկապակցման սարքի գործառույթը `տրանսպորտային միջոցը կանխելու համար մեքենան ավտոմատ կերպով տեղափոխվել կամ տեղափոխվել շարժասանդուղքի ընթացքում (օրինակ, ուղղակիորեն նետվելով փոխանցումից մինչեւ չեզոք): Փոխույքի գործառույթը `միաժամանակ երկու փոխանցում վերածելը կանխելը (օրինակ, փոխանցում 1-ի եւ փոխանցման 3-ը): Երբ պողպատե գնդակը քաշվում է Groove 2-ի ձախից մինչեւ Groove 1-ը, փոխանցում է փոխանցում. Նմանապես, երբ նա դուրս է գալիս Groove 3-ի աջ, փոխանցման հերթափոխը նույնպես իրականացվում է: Այս եղանակով, կճեպի եւ ինքնասոսնձվող պողպատե գնդակի համատեղ գործողության ներքո եւ Shift Fork Shaft- ի վրա գտնվող ինքնասպասարկման վրա գտնվող ինքնուրույն աշտարակ (Groove- ը խրված է պողպատե գնդակի հետ), ավտոմատ փոխանցման հերթափոխում արդյունավետորեն կանխվում են: Վերը նշված ցուցանիշը ցույց է տալիս ձեռքով փոխանցման փոխկապակցման սարքը: Գործիչից մենք կարող ենք տեսնել, որ այն ունի երեք հերթափոխի պատառաքաղի լիսեռներ, մեջտեղում է միջքաղաքային քորոցը եւ փխրուն պողպատե գնդակը, եւ ստվերավորված մասը տեղադրվում է հերթափոխի պատառաքաղը:
Դրա գործառնական սկզբունքը հետեւյալն է. Երբ վերին հերթափոխի պատառաքաղը զբաղվում է հանդերձանքով (ինչպես ցույց է տրված երրորդ ցուցանիշով) , որպեսզի արգելափակենք միջին եւ ստորին հերթափոխի պատառաքաղի լիսեռները: Արդյունքում, պողպատե ստորին փոխկապակցված գնդակը այլեւս չի կարող առանձնացվել ստորին հերթափոխի պատառաքաղից, որպեսզի այն այլեւս չի կարող տեղավորվել, եւ վերջապես թույլ չտան միաժամանակ դնել երկու փոխանցում