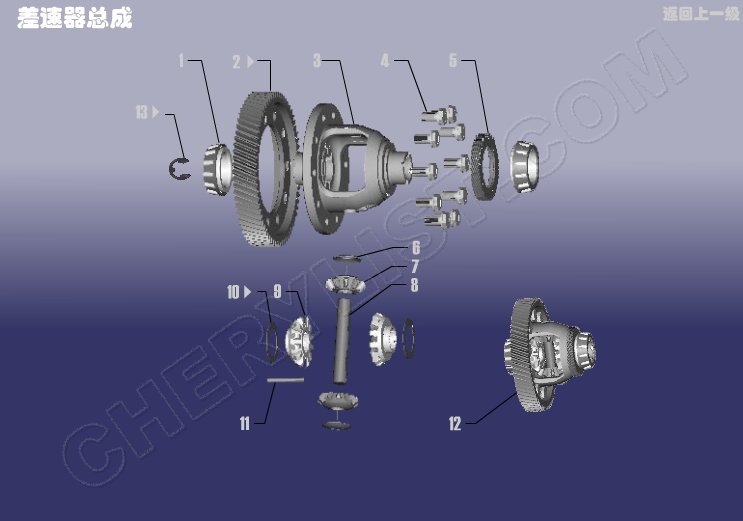
ລະບົບສາຍສົ່ງ qr519 asy Indentia ສໍາລັບ chey a3 m11
1 QR519MHA-1701703 Fr-rr Bearing - Ingentia
2 CSQ-CDCL CDCL REBNN GEAR - Indentia
3 QR519MHA-1701701 ທີ່ພັກອາໄສ - ຄວາມແຕກຕ່າງ
5 QR519MHA-1701705 Gear Coard - Odometer
6 QR519MHA-1701714 WASHER - ບານ
7 qr523-1701701711 ເກຍ - plangeary ສ່ວນຕ່າງ
8 qr523-1701712 - ເພົາ - anentia Pinion
9 QR523-1701709 SD Gear
10 CSQ-BZCLTP WASHER - ເຄື່ອງມື SD
11 QR519MHA-1701713 PIN - Gear Parketay Gear Shaft
12 QR519MHA-1701700 Intentia ASSY
13 CSQ-Tzdp Washer - RR Anventia Bearing Ring OTR
1, ການສົ່ງຕໍ່ແມ່ນຕັ້ງຢູ່ຫລັງເຄື່ອງຈັກ, ແລະທີ່ຢູ່ອາໄສຂອງມັນແມ່ນມີການສ້ອມແຊມກັບເຄື່ອງຈັກໂດຍສະກູ.
2, ຫນ້າທີ່ຂອງການສົ່ງຕໍ່
1. ປ່ຽນອັດຕາສ່ວນສົ່ງໄຟຟ້າ (ກໍານົດຄວາມໄວຂອງລົດທີ່ກໍາລັງດໍາເນີນໄປໃນຄວາມໄວຂອງເຄື່ອງຈັກດຽວກັນ)
2. ປ່ຽນທິດທາງຂອງກໍາລັງ (ປີ້ນກັບກັນ)
3. ຮັບຮູ້ເຄື່ອງມືທີ່ເປັນກາງ (ບໍ່ເຮັດວຽກຢູ່ໃນສະຖານທີ່).
3, ອີງຕາມການຈັດປະເພດການສົ່ງຕໍ່ການສົ່ງຕໍ່, ລະບົບສາຍສົ່ງແມ່ນແບ່ງອອກເປັນລະບົບສາຍສົ່ງຄູ່ມືແລະລະບົບສາຍສົ່ງອັດຕະໂນມັດ, ແລະເຄື່ອງເກຍຂອງພວກເຂົາກໍ່ແຕກຕ່າງກັນ. ດັ່ງທີ່ສະແດງຢູ່ໃນຕົວເລກຂ້າງລຸ່ມນີ້, ພວກເຮົາທຸກຄົນຮູ້ວ່າລົດໃຫຍ່ແບ່ງອອກເປັນ Drive ແລະ Drive ດ້ານຫລັງ. ເພື່ອປັບຕົວເຂົ້າກັບມັນ, ລະບົບສາຍສົ່ງກໍ່ແບ່ງອອກເປັນລະບົບສາຍສົ່ງຂ້າມຜ່ານແລະລະບົບສາຍສົ່ງຕາມລວງຍາວ. ການສົ່ງຕໍ່ຂວາງເທົ່າກັບການຂັບຕໍ່ຫນ້າແລະລະບົບສາຍສົ່ງຕາມລວງຍາວເທົ່າກັບການຂັບຂີ່ຫລັງ. ໃນຖານະເປັນຄວາມສັບສົນຂອງການສົ່ງໂດຍອັດຕະໂນມັດແມ່ນສູງກວ່າເລັກນ້ອຍ, ໃຫ້ເຮົາຮຽນຮູ້ຄວາມຮູ້ໃນລະບົບສາຍສົ່ງຄູ່ມືຄັ້ງທໍາອິດ, ສະນັ້ນໃນທີ່ນີ້ພວກເຮົາຈະອະທິບາຍການສົ່ງຕໍ່ໃຫ້ທ່ານ.
4, ສ່ວນປະກອບຂອງລະບົບສາຍສົ່ງໂດຍທົ່ວໄປແມ່ນປະກອບດ້ວຍເຄື່ອງຫມາຍການສົ່ງທີ່ມີຄວາມແຕກຕ່າງກັນ), ເຄື່ອງເຈາະລະດັບຄວາມແຕກຕ່າງ), ປະທັບຕາ, ນ້ໍາມັນທີ່ຫລໍ່ຫລອມ, ຫອຍ, ກະແສຜົນຜະລິດແລະອື່ນໆ. ໃນຄວາມເປັນຈິງ, ການຮູ້ຈັກການປ່ຽນແປງແມ່ນການເຊື່ອມຕໍ່ເຄື່ອງມືປ່ຽນທີ່ແຕກຕ່າງກັນແລະແຫວນ synchronous ຜ່ານເສອແຂນຮ່ວມກັນ. ຫຼັງຈາກນັ້ນ, ພະລັງງານແມ່ນຜົນຜະລິດໃຫ້ແກ່ການຜະລິດຂອງຜົນຜະລິດຜ່ານ Synchronizer ເພື່ອຮັບຮູ້ຜົນຜະລິດເກຍທີ່ແຕກຕ່າງກັນ. ເມື່ອຍ້າຍ, ພວກເຮົາຍ້າຍມືຄວບຄຸມການປ່ຽນແປງ, ແລະຫຼັງຈາກນັ້ນດຶງຄວາມຍາວຂອງການປ່ຽນແປງໃນລະບົບສາຍສົ່ງພາຍໃຕ້ການກະທໍາຂອງສາຍປ່ຽນ. The Shift Exift ຍ້າຍເສື້ອແຂນຮ່ວມກັນໃສ່ synchronizer ເພື່ອຮັບຮູ້ການປ່ຽນແປງຂອງເກຍທີ່ແຕກຕ່າງກັນ.
5, ຫນ້າທີ່ຂອງການລັອກດ້ວຍຕົນເອງແລະ Interlock ຂອງການສົ່ງຕໍ່ໂດຍອັດຕະໂນມັດຄູ່ມືແມ່ນເພື່ອປ້ອງກັນພາຫະນະຈາກການປ່ຽນແປງຫຼືປ່ຽນອອກຈາກການຂັບຂີ່ (ເຊັ່ນ: ໂດດໂດຍກົງຈາກ Gear 2 ໄປສູ່ເຄື່ອງມື ຫນ້າທີ່ຂອງການຂັດຂວາງແມ່ນເພື່ອປ້ອງກັນການປ່ຽນເປັນສອງເກຍໃນເວລາດຽວກັນ (ຕົວຢ່າງ, ປ່ຽນເປັນເກຍ 1 ແລະເກຍ 3 ໃນເວລາດຽວກັນ). ໃນເວລາທີ່ບານເຫຼັກຖືກດຶງມາຈາກຊ້າຍຂອງ groove 2 ເຖິງ groove 1, ການປ່ຽນ gear ໄດ້ຖືກຮັບຮູ້; ເຊັ່ນດຽວກັນ, ໃນເວລາທີ່ລາວດຶງ groove 3 ໄປທາງຂວາ, ການປ່ຽນເກຍກໍ່ໄດ້ຮັບຮູ້. ໃນວິທີການນີ້, ພາຍໃຕ້ການປະຕິບັດຮ່ວມຂອງລະດູໃບໄມ້ປົ່ງແລະຕົວເອງ locking self-locking she-locking ບານແລະຮ່ອງນ້ໍາຂອງ shek shaft ກັບບານເຫຼັກ) ໄດ້ຖືກປ້ອງກັນຢ່າງມີປະສິດຕິຜົນ. ຕົວເລກຂ້າງເທິງສະແດງໃຫ້ເຫັນອຸປະກອນເຈາະຂອງລະບົບສາຍສົ່ງຄູ່ມື. ຈາກຕົວເລກ, ພວກເຮົາສາມາດເຫັນໄດ້ວ່າມັນມີເຄື່ອງຫມາຍການສ້ອມແປງສາມລ້ຽວ, ແລະສ່ວນກາງຂອງເຫຼັກແມ່ນເຊື່ອມຕໍ່ກັບການເຊື່ອມຕໍ່ຂອງສ້ອມ, ເຊິ່ງມີການຕິດຕັ້ງບານ Shifting Stek.
ຫຼັກການທີ່ປະຕິບັດງານຂອງມັນແມ່ນ: ໃນເວລາທີ່ການສ້ອມແປງສ່ວນເທິງແມ່ນມີສ່ວນຮ່ວມໃນຕົວເລກ (ດັ່ງທີ່ສະແດງຢູ່ໃນຕົວເລກທີສາມຈະຍ້າຍໄປຢູ່ເທິງຈຸດກາງເວັນ , ເພື່ອສະກັດກັ້ນການສັ່ນສະເທືອນຂອງເວລາກາງແລະຕ່ໍາ. ດັ່ງນັ້ນ, ບານເຫຼັກທີ່ຕ່ໍາກວ່າທີ່ບໍ່ສາມາດແຍກອອກຈາກຄວາມຍາວຂອງຕ່ໍາກວ່າ, ເພື່ອໃຫ້ມັນບໍ່ສາມາດເອົາເຂົ້າໄປໃນເຄື່ອງມື, ແລະໃນເວລາດຽວກັນ